
Page 53 - 2018 電子科技產業年鑑
P. 53
科
技
創
新
篇
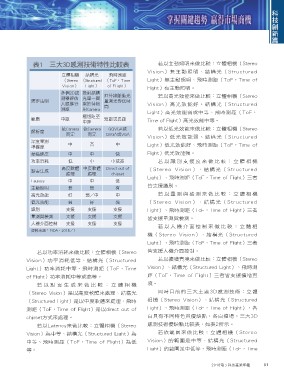
若以功率消耗來做比較:立體相機(Stereo 若以主動照明來做比較:立體相機(Stereo
Vision)功率消耗低等、結構光(Structured Vision)無主動照明、結構光(Structured
Light)功率消耗中等、飛時測距(ToF,Time Light)無主動照明、飛時測距(ToF,Time of
of Flight)功率消耗中等或高等。 Flight)有主動照明。
若以點雲生成來做比較:立體相機 若以高光效能來做比較:立體相機(Stereo
(Stereo Vision)是以高度軟體來處理、結構光 Vision)高光效能好、結構光(Structured
(Structured Light)是以中度軟體來處理、飛時 Light)高光效能弱或中等、飛時測距(ToF,
測距(ToF,Time of Flight)是以direct out of Time of Flight)高光效能中等。
chipset方式來處理。
若以低光效能來做比較:立體相機(Stereo
若以Latency來做比較:立體相機(Stereo Vision)低光效能弱、結構光(Structured
Vision)為中等、結構光(Structured Light)為 Light)低光效能好、飛時測距(ToF,Time of
中等、飛時測距(ToF,Time of Flight)為低 Flight)低光效能強。
等。
若以識別支援度來做比較:立體相機
(Stereo Vision)、結構光(Structured
Light)、飛時測距(ToF,Time of Flight)三者
皆支援識別。
若以量測與檢測來做比較:立體相機
(Stereo Vision)、結構光(Structured
Light)、飛時測距(ToF,Time of Flight)三者
皆支援量測與檢測。
若以人機介面控制來做比較:立體相
機(Stereo Vision)、結構光(Structured
Light)、飛時測距(ToF,Time of Flight)三者
皆支援人機介面控制。
若以擴增實境來做比較:立體相機(Stereo
Vision)、結構光(Structured Light)、飛時測
距(ToF,Time of Flight)三者皆支援擴增實
境。
同時目前的三大主要3D感測技術:立體
相機(Stereo Vision)、結構光(Structured
Light)、飛時測距(ToF,Time of Flight),各
自具有不同特色與優缺點,各自擅場。三大3D
感測技術優缺點比較表,如表2所示。
若依範圍來做比較:立體相機(Stereo
Vision)的範圍是中等、結構光(Structured
Light)的範圍是中低等、飛時測距(ToF,Time
2018電子科技產業年鑑 51