
Page 54 - 2018 電子科技產業年鑑
P. 54
of Flight)的範圍是高等。 距(ToF,Time of Flight)的低光效能是高等。
若依深度來做比較:立體相機(Stereo 若依延遲來做比較:立體相機(Stereo
Vision)的深度是中低等、結構光(Structured Vision)的延遲是中等、結構光(Structured
Light)的深度是中低等、飛時測距(ToF,Time Light)的延遲是中等、飛時測距(ToF,Time
of Flight)的深度是中等。 of Flight)的延遲是高等。
若依掃描速度來做比較:立體相機 若依軟體複雜度來做比較:立體相機
(Stereo Vision)的掃描速度是中低等、結構光 (Stereo Vision)的軟體複雜度是高等、結構光
(Structured Light)的掃描速度是中等、飛時測 (Structured Light)的軟體複雜度是中等、飛時
距(ToF,Time of Flight)的掃描速度是高等。 測距(ToF,Time of Flight)的軟體複雜度是中
低等。
若依準確度/解析度來做比較:立體相機
(Stereo Vision)的準確度/解析度是中等、結 若依成本優勢來做比較:立體相機(Stereo
構光(Structured Light)的準確度/解析度是高 Vision)的成本優勢是高等、結構光(Structured
等、飛時測距(ToF,Time of Flight)的準確度 Light)的成本優勢是中等、飛時測距(ToF,
/解析度是中低等。 Time of Flight)的成本優勢是中低等。
若依高光效能來做比較:立體相機(Stereo VCSEL是3D感測的核心技術之一
Vision)的高光效能是高等、結構光(Structured
Light)的高光效能是中低等、飛時測距(ToF, 由於3D感測(3D Sensing)其中的關鍵技
Time of Flight)的高光效能是高等。 術為半導體雷射LD,作為3D感測主要的光源,
是推動整個系統的原動力。
若依低光效能來做比較:立體相機
(Stereo Vision)的低光效能是中低等、結構光 半導體雷射LD的一些優點,包含:電光
(Structured Light)的低光效能是中等、飛時測 轉換效率高(可達40%以上)、耗電少、壽
命長、瞬間即可達到開關的作用(適合高速傳
輸)、可得到各種波長、堅固體積小重量輕等優
點。
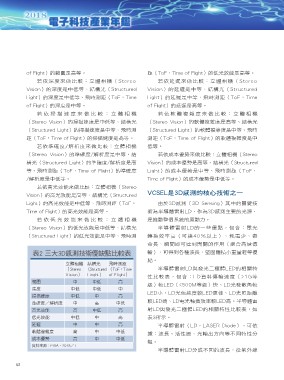
半導體雷射LD與發光二極體LED的相關特
性比較表,包含:LD資料傳輸速度(>1G等
級)較LED(<500M等級)快、LD光發散角較
LED小、LD光色純度較LED更佳、LD光照距離
較LED遠、LD電光轉換效率較LED高。半導體雷
射LD與發光二極體LED的相關特性比較表,如
表3所示。
半導體雷射(LD,LASER Diode),可依
據:波長、活性層、光輸出方向等不同特性分
類。
半導體雷射LD分成不同的波長,從紫外線
52